Dù không được lập trình trước nhưng con robot này đã có thể tự học đi!
 7 tính năng điện thoại Android nên học hỏi iPhone
7 tính năng điện thoại Android nên học hỏi iPhone Apple đã hoàn thiện iOS 16
Apple đã hoàn thiện iOS 16Các nhà nghiên cứu tại Đại học California , Berkeley , đã chế tạo một robot độc nhất vô nhị: một robot tự học cách đi bộ.
Hầu hết tất cả những sinh vật trên cạn đều đã phải học cách đi bộ từ khi còn nhỏ. Mỗi loài động vật khác nhau sẽ mất một khoảng thời gian khác nhau để có thể làm chủ đôi chân của mình: trẻ sơ sinh của chúng ta mất vài tháng hoặc vài năm để làm điều đó, linh dương con có thể làm điều đó gần như ngay khi chúng được sinh ra. Và, nếu chúng ta lấy thời gian để làm thước đo cho quá trình tập đi thì trong một nghiên cứu mới đây, các nhà khoa học đã tạo ra một con robot đã có thể học đi chỉ trong vòng một giờ và không cần lập trình trước.
Con robot đặc biệt này là một thiết bị bốn chân giống như một con chó con cơ học, nó có thể tự học cách đi lại mà không cần được hiển thị bất kỳ mô phỏng nào để hướng dẫn nó trước đó.

Theo các chuyên gia, một nhà chế tạo robot sẽ cần thực hiện từng công việc mà họ muốn robot giải quyết, việc này có thể tốn nhiều thời gian và có thể khó khăn trong việc lập trình các hành vi ứng xử của robot đối với các tình huống bất ngờ.
Lerrel Pinto, đồng tác giả nghiên cứu và là trợ lý giáo sư khoa học máy tính tại Đại học New York, người chuyên về robot và máy học cho biết, kỳ tích này đã được thực hiện bởi một AI mà nhóm thiết kế và đặt tên là Dreamer.
Dreamer dựa trên một kỹ thuật được gọi là học tăng cường – ‘đào tạo’ các thuật toán bằng cách phản hồi liên tục, và đứa ra những tín hiệu thưởng cho các hành động mong muốn chẳng hạn như hoàn thành thành công một nhiệm vụ. Theo một nghĩa nào đó, quá trình này tương tự như cách chúng ta tự học.
Cách tiếp cận phổ biến trong việc đào tạo robot là sử dụng mô phỏng máy tính để cho chúng nắm được những kiến thức cơ bản về bất cứ điều gì chúng đang làm trước khi bắt chúng thực hiện các nhiệm vụ tương tự trong thế giới thực.
“Vấn đề là trình mô phỏng của bạn sẽ không bao giờ chính xác như thế giới thực”, Danijar Hafner, một nghiên cứu sinh về trí tuệ nhân tạo tại Đại học Toronto và đồng tác giả bài báo cho biết.
Điều đặc biệt ở Dreamer là nó sử dụng những kinh nghiệm trong quá khứ để tự xây dựng mô hình của thế giới xung quanh và tiến hành tính toán thử-sai trong một mô phỏng dựa trên mô hình này.
Nói cách khác, nó có thể thực hiện nhiệm vụ của mình bên trong một tấm gương giống như giấc mơ về thế giới của chúng ta bằng cách dự đoán kết quả tiềm năng của những hành động mà nó dự định thực hiện. Được trang bị kiến thức này, nó có thể thử những gì nó học được trong phòng thí nghiệm. Nó thực hiện tất cả những điều này một mình. Về cơ bản, nó đang dạy chính nó.
Cách tiếp cận này cho phép AI học nhanh hơn nhiều so với trước đây. Lúc đầu, tất cả những gì nó có thể xoay sở là vẫy chân trong không trung một cách bất lực. Mất khoảng 10 phút để nó tự lật người lại và khoảng 30 phút để thực hiện những bước đầu tiên. Tuy nhiên, một giờ sau khi thí nghiệm bắt đầu, nó có thể dễ dàng đi vòng quanh phòng thí nghiệm bằng đôi chân vững vàng.
Ngoài việc tự dạy mình cách đi bộ, Dreamer sau đó có thể thích nghi với các tình huống bất ngờ, chẳng hạn như chống lại việc bị lật đổ bởi một trong các thành viên trong nhóm.
Kết quả cho thấy những thành tựu đáng kinh ngạc mà học tăng cường sâu có thể đạt được khi được ghép nối với các mô hình từ, đặc biệt khi xem xét rằng robot không nhận được hướng dẫn trước. Việc sử dụng song song hai hệ thống này đã cắt giảm đáng kể thời gian đào tạo truyền thống kéo dài cần thiết trong quá trình học tăng cường thử-và-sai cho robot.
Hơn nữa, việc loại bỏ nhu cầu đào tạo robot bên trong mô phỏng và cho phép chúng thực hành bên trong mô hình thế giới của chúng thay vào đó có thể cho phép chúng học các kỹ năng trong thời gian thực – cung cấp cho chúng công cụ để thích ứng với các tình huống bất ngờ như lỗi phần cứng. Nó cũng có thể có các ứng dụng trong các nhiệm vụ phức tạp, khó khăn như lái xe tự hành.
Sử dụng cách tiếp cận này, nhóm đã huấn luyện thành công ba robot khác nhau để thực hiện các nhiệm vụ khác nhau, chẳng hạn như nhặt bóng và di chuyển chúng giữa các khay.
Một nhược điểm của phương pháp này là nó rất tốn thời gian để thiết lập ban đầu. Các nhà nghiên cứu cần chỉ rõ trong mã nguồn rằng những hành vi nào là tốt – và do đó nên được khen thưởng – và hành vi nào không được phép. Mỗi và mọi nhiệm vụ hoặc vấn đề mà robot phải giải quyết sẽ cần được chia nhỏ thành các nhiệm vụ phụ và mỗi nhiệm vụ phụ được xác định theo nghĩa tốt hoặc xấu. Điều này cũng làm cho nó rất khó để lập trình cho các tình huống bất ngờ.
Các nhà nghiên cứu đang hy vọng trong tương lai có thể dạy robot hiểu các mệnh lệnh bằng lời nói, cũng như gắn camera cho chó robot để tạo cho nó khả năng nhìn và cho phép nó di chuyển trong các tình huống phức tạp trong nhà, và thậm chí có thể chơi trò tìm kiếm.
Không chỉ con người, ngày nay robot cũng có thể thực hiện được các động tác vô cùng phức tạp
Robot hình người của Boston Dynamics - Atlas, được coi là robot linh hoạt nhất từng được tạo ra.
Một video mới được công bố vào ngày 17 tháng 8 cho thấy Atlas nhảy qua chướng ngại vật, lộn ngược và thậm chí thực hiện rất nhiều chuyển động phức tạp.
Công ty Boston Dynamics cho biết nếu một robot có thể phát triển chuyển động và linh hoạt giống như một người trưởng thành bình thường, thì phạm vi ứng dụng tiềm năng trên thực tế của nó sẽ là vô hạn.

Các thuật toán nhận thức của robot được sử dụng để chuyển đổi dữ liệu từ các cảm biến như máy ảnh và lidar thành một thứ hữu ích cho việc ra quyết định và lập kế hoạch cho các hành động vật lý.
Trưởng nhóm Atlas Scott Kuindersma cho biết: "Parkour là một bộ môn thể thao khó, và đây cũng là một trong những mục tiêu để phát triển robot. Do đó cần phải kết nối nhận thức với hành động theo cách vừa đạt được các mục tiêu dài hạn như đạt được từ điểm A đến điểm B và các mục tiêu động ngắn hạn như điều chỉnh bước chân và áp dụng các lực điều chỉnh để duy trì sự cân bằng".
Atlas cao 5 feet (1,52m), nặng 190 pound (86kg), sử dụng thủy lực và động cơ điện chạy bằng pin để di chuyển và có ba máy tính được tích hợp trên bo mạch.
Atlas hiện là một mô hình nghiên cứu, không giống như mô hình Spot của nó, nhằm mục đích thúc đẩy các giới hạn của người máy. Công ty cho biết việc thực hành parkour sẽ hữu ích cho các robot trợ giúp trong tương lai trong việc phát triển phạm vi chuyển động và tính linh hoạt giống như con người.
Atlas sử dụng máy ảnh đo độ sâu thời gian bay để tạo ra các đám mây điểm của môi trường với tốc độ 15 khung hình/ giây. Đám mây điểm là một tập hợp lớn các phép đo phạm vi. Phần mềm nhận thức của Atlas trích xuất các bề mặt từ đám mây điểm này bằng cách sử dụng một thuật toán được gọi là phân đoạn đa mặt phẳng. Đầu ra của thuật toán này được đưa vào một hệ thống lập bản đồ xây dựng mô hình của các đối tượng khác nhau mà Atlas nhìn thấy bằng máy ảnh của nó.
Hoạt ảnh này là một hình ảnh trực quan 3D cho thấy những gì robot đang nhìn thấy và lập kế hoạch khi nó điều hướng các chướng ngại vật parkour. Các đối tượng được theo dõi chủ động được vẽ bằng màu xanh lá cây và mờ dần từ màu xanh lá cây sang màu tím khi chúng nằm ngoài tầm nhìn của cảm biến nhận thức của robot. Hệ thống theo dõi liên tục ước tính tư thế của các đối tượng trên thế giới và hệ thống định vị lập kế hoạch bước chân màu xanh lá cây so với các đối tượng đó bằng cách sử dụng thông tin từ bản đồ.

Mỗi bước di chuyển mà bạn thấy Atlas thực hiện trong quá parkour đều bắt nguồn từ một mẫu được tạo trước bằng cách sử dụng tối ưu hóa quỹ đạo. Thư viện các mẫu này cho phép các nhà nghiên cứu tiếp tục bổ sung các khả năng mới cho robot bằng cách thêm quỹ đạo mới vào thư viện. Đưa ra các mục tiêu đã lên kế hoạch từ nhận thức, robot sẽ tự lựa chọn các hành vi từ thư viện phù hợp với các mục tiêu.
Bộ điều khiển của Atlas được gọi là bộ điều khiển dự đoán mô hình (MPC) vì nó sử dụng mô hình động lực học của robot để dự đoán chuyển động của nó sẽ phát triển như thế nào trong tương lai. Bộ điều khiển hoạt động bằng cách giải quyết tối ưu hóa tính toán điều tốt nhất cần làm ngay bây giờ để tạo ra chuyển động tốt nhất có thể theo thời gian.
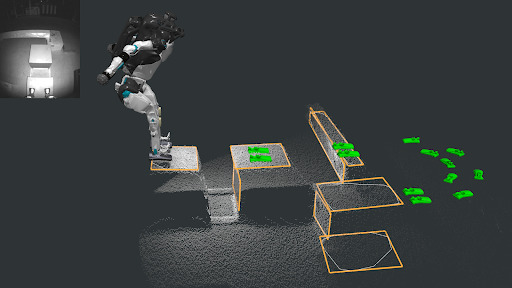
Atlas nhìn thấy gì và nhận thức đó được sử dụng như thế nào để lập kế hoạch hành động. Ở trên cùng bên trái là hình ảnh hồng ngoại được chụp bởi camera độ sâu. Các điểm màu trắng trong hình ảnh chính tạo thành đám mây điểm. Đường viền màu cam đánh dấu các mặt hình chữ nhật được phát hiện của chướng ngại vật parkour, được theo dõi theo thời gian từ các quan sát cảm biến.
Thuộc tính dự đoán của MPC cũng cho phép Atlas xem qua các ranh giới hành vi. Ví dụ, khi biết rằng một bước nhảy được theo sau bởi một cú lộn ngược, bộ điều khiển có thể tự động tạo ra các chuyển đổi mượt mà từ chuyển động này sang chuyển động khác. Điều này một lần nữa đơn giản hóa vấn đề tạo hành vi vì chúng ta không cần tính đến tất cả các chuỗi hành vi có thể xảy ra trước thời hạn.

Hệ thống điều khiển tiên tiến và phần cứng hiện đại của Atlas cung cấp cho robot sức mạnh và sự cân bằng để thể hiện sự nhanh nhẹn ở cấp độ con người. Atlas có sở hữu những hệ thống thủy lực di động nhỏ gọn nhất thế giới. Pin tùy chỉnh, van và bộ nguồn thủy lực nhỏ gọn cho phép Atlas cung cấp công suất cao cho bất kỳ khớp nối thủy lực nào trong số 28 khớp nối thủy lực của nó để tạo ra những kỳ tích ấn tượng về khả năng di chuyển.

Hệ thống điều khiển tiên tiến của Atlas cho phép chuyển động rất đa dạng và nhanh nhẹn, trong khi các thuật toán sẽ điều chỉnh các tương tác động phức tạp liên quan đến toàn bộ cơ thể và môi trường để lập kế hoạch chuyển động.
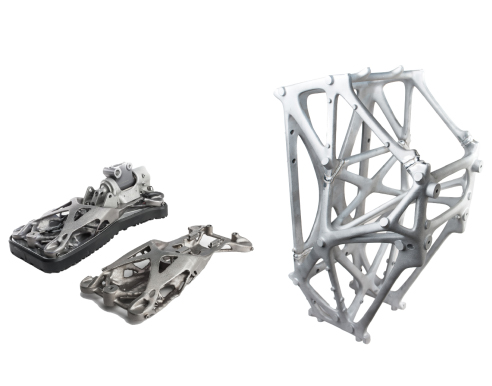
Atlas sử dụng các bộ phận được in 3D để cung cấp cho nó tỷ lệ sức mạnh trên trọng lượng cần thiết cho những bước nhảy vọt và lộn nhào
Samsung giới thiệu robot AI quản gia  Robot quản gia này sẽ giúp người dùng dễ dàng dọn dẹp căn phòng bừa bộn, cất giữ hàng tạp hóa, dọn bàn ăn và thậm chí chuyển bát đĩa từ bồn rửa sang máy rửa bát... Sự kiện Triển lãm Điện tử Tiêu dùng Quốc tế (CES) thường niên là nơi ghi nhận những ý tưởng đổi mới, sáng tạo và thậm...
Robot quản gia này sẽ giúp người dùng dễ dàng dọn dẹp căn phòng bừa bộn, cất giữ hàng tạp hóa, dọn bàn ăn và thậm chí chuyển bát đĩa từ bồn rửa sang máy rửa bát... Sự kiện Triển lãm Điện tử Tiêu dùng Quốc tế (CES) thường niên là nơi ghi nhận những ý tưởng đổi mới, sáng tạo và thậm...
Tin liên quan
 Amazon chi 1,7 tỷ USD 'tiền tươi' mua nhà sản xuất robot hút bụi hàng đầu thế giới
Amazon chi 1,7 tỷ USD 'tiền tươi' mua nhà sản xuất robot hút bụi hàng đầu thế giới iOS 16 giúp người dùng bỏ qua "xác thực không phải robot"
iOS 16 giúp người dùng bỏ qua "xác thực không phải robot" Khám phá chú chó robot Sony Aibo, món đồ chơi có giá 70 triệu mà mọi đứa trẻ đều mơ ước!
Khám phá chú chó robot Sony Aibo, món đồ chơi có giá 70 triệu mà mọi đứa trẻ đều mơ ước! Robot Nhật Bản học cách thể hiện cảm xúc giống người thật
Robot Nhật Bản học cách thể hiện cảm xúc giống người thật Bandai Namco đầu tư 130 triệu USD vào Gundam Metaverse
Bandai Namco đầu tư 130 triệu USD vào Gundam Metaverse Những dự báo về công nghệ và tự động hóa trong năm 2022
Những dự báo về công nghệ và tự động hóa trong năm 2022
 Hàn Quốc cho phép robot giao hàng trên đường vào năm 2023
Hàn Quốc cho phép robot giao hàng trên đường vào năm 2023 Robot 'bắt đáy' Bitcoin mang lại lợi nhuận vượt trội
Robot 'bắt đáy' Bitcoin mang lại lợi nhuận vượt trội Robot AI giúp con người giải quyết nạn rác thải điện tử từ smartphone
Robot AI giúp con người giải quyết nạn rác thải điện tử từ smartphone Robot phục vụ cocktail tại Olympic mùa đông 2022
Robot phục vụ cocktail tại Olympic mùa đông 2022 Elon Musk tiết lộ sản phẩm quan trọng nhất cho tương lai Tesla
Elon Musk tiết lộ sản phẩm quan trọng nhất cho tương lai Tesla 'Vũ khí' bí mật của Trung Quốc trong cuộc chiến công nghệ với Mỹ
'Vũ khí' bí mật của Trung Quốc trong cuộc chiến công nghệ với Mỹ Chàng trai có ca khúc được chọn cho Đại lễ 2/9: "Con tướng" mạnh của Anh Trai mùa 2, chạm tay là có hit01:23:30
Chàng trai có ca khúc được chọn cho Đại lễ 2/9: "Con tướng" mạnh của Anh Trai mùa 2, chạm tay là có hit01:23:30 Sao nghĩ ra câu hát "hết kháng chiến con còn chưa về, mẹ ơi vui lên, mẹ có đứa con anh hùng" hay thế nhỉ?04:43
Sao nghĩ ra câu hát "hết kháng chiến con còn chưa về, mẹ ơi vui lên, mẹ có đứa con anh hùng" hay thế nhỉ?04:43 Clip HOT: Hoàng Thuỳ Linh bật chế độ "nóc nhà", Đen Vâu răm rắp nghe lời!00:29
Clip HOT: Hoàng Thuỳ Linh bật chế độ "nóc nhà", Đen Vâu răm rắp nghe lời!00:29 Sao nam Vbiz cầu hôn bạn trai ngoài ngành sau 12 năm hẹn hò?02:01
Sao nam Vbiz cầu hôn bạn trai ngoài ngành sau 12 năm hẹn hò?02:01 Mỹ Tâm cất giọng đầy nội lực, cùng Double2T "rực cháy" ở concert quốc gia04:39
Mỹ Tâm cất giọng đầy nội lực, cùng Double2T "rực cháy" ở concert quốc gia04:39 Đây rồi màn đồng diễn được mong chờ nhất Đại lễ 2/9: Dàn nghệ sĩ hát liên khúc Khí Phách Việt Nam, Mỹ Tâm làm rung động triệu trái tim!13:13
Đây rồi màn đồng diễn được mong chờ nhất Đại lễ 2/9: Dàn nghệ sĩ hát liên khúc Khí Phách Việt Nam, Mỹ Tâm làm rung động triệu trái tim!13:13 Gần 100 triệu người ùa vào xem Hoắc Kiến Hoa ôm hôn Lâm Tâm Như00:28
Gần 100 triệu người ùa vào xem Hoắc Kiến Hoa ôm hôn Lâm Tâm Như00:28 Trọn bộ hình như "hình cưới" của Đen Vâu và Hoàng Thuỳ Linh: Ánh mắt nhà trai nhìn "nóc nhà" lạ quá!00:44
Trọn bộ hình như "hình cưới" của Đen Vâu và Hoàng Thuỳ Linh: Ánh mắt nhà trai nhìn "nóc nhà" lạ quá!00:44 Puka và Gin Tuấn Kiệt lần đầu hé lộ hình ảnh hiếm của nhóc tỳ01:00
Puka và Gin Tuấn Kiệt lần đầu hé lộ hình ảnh hiếm của nhóc tỳ01:00 Cục Trưởng Xuân Bắc dặn dò các nghệ sĩ: 80 năm mới có một lần, hãy nghiêm túc hết mình!01:00
Cục Trưởng Xuân Bắc dặn dò các nghệ sĩ: 80 năm mới có một lần, hãy nghiêm túc hết mình!01:00 Không phải Duyên Quỳnh hay Võ Hạ Trâm, "cha đẻ" chọn đây mới là người hát Viết Tiếp Câu Chuyện Hoà Bình ấn tượng nhất05:11
Không phải Duyên Quỳnh hay Võ Hạ Trâm, "cha đẻ" chọn đây mới là người hát Viết Tiếp Câu Chuyện Hoà Bình ấn tượng nhất05:11Tiêu điểm
 Viettel Money hướng dẫn nhận tiền trợ cấp an sinh xã hội trên VNeID
Viettel Money hướng dẫn nhận tiền trợ cấp an sinh xã hội trên VNeID Lý do công nghệ này được ưu tiên khi mua pin lưu trữ điện mặt trời
Lý do công nghệ này được ưu tiên khi mua pin lưu trữ điện mặt trời Tính năng "vàng" trên iOS 26 có thực sự hiệu quả như Apple quảng cáo?
Tính năng "vàng" trên iOS 26 có thực sự hiệu quả như Apple quảng cáo? Lý do nhà khoa học trưởng Google tránh nói về siêu AI
Lý do nhà khoa học trưởng Google tránh nói về siêu AI One UI 8 ra mắt tháng 9, thiết bị Galaxy của bạn có được "lên đời"?
One UI 8 ra mắt tháng 9, thiết bị Galaxy của bạn có được "lên đời"? iPhone của Apple đang tụt hậu nhưng không phải do AI
iPhone của Apple đang tụt hậu nhưng không phải do AI Tin công nghệ nổi bật trong tuần: Malaysia có chip AI, Huawei và Apple 'so găng' smartphone mới
Tin công nghệ nổi bật trong tuần: Malaysia có chip AI, Huawei và Apple 'so găng' smartphone mới Samsung phát hành One UI 8 trên nền Android 16 cho Galaxy S
Samsung phát hành One UI 8 trên nền Android 16 cho Galaxy STin đang nóng
 Hồ Ngọc Hà xóa bài đăng gây tranh cãi về việc vắng bóng tại Đại lễ 2/9
Hồ Ngọc Hà xóa bài đăng gây tranh cãi về việc vắng bóng tại Đại lễ 2/9 Buổi cà phê và cuộc gọi cuối cùng của diễn viên Ngọc Trinh
Buổi cà phê và cuộc gọi cuối cùng của diễn viên Ngọc Trinh Trương Bá Chi sao ra nông nỗi này: Mặt cứng đơ như tượng sáp, làm răng sứ "giả trân" đến phát sợ
Trương Bá Chi sao ra nông nỗi này: Mặt cứng đơ như tượng sáp, làm răng sứ "giả trân" đến phát sợ
 Phạm Quỳnh Anh bức xúc lên tiếng khi 2 cô con gái bị tấn công
Phạm Quỳnh Anh bức xúc lên tiếng khi 2 cô con gái bị tấn công Mẹ chồng không bao giờ bế cháu, cho đến lúc bà ngồi xuống nói 1 câu khiến cả nhà lặng im
Mẹ chồng không bao giờ bế cháu, cho đến lúc bà ngồi xuống nói 1 câu khiến cả nhà lặng im Mỹ nhân Việt công khai sánh đôi bên bác sĩ thẩm mỹ sau 5 lần 7 lượt vướng tin tình cảm, bí mật sinh con
Mỹ nhân Việt công khai sánh đôi bên bác sĩ thẩm mỹ sau 5 lần 7 lượt vướng tin tình cảm, bí mật sinh conTin mới nhất

Tận thấy robot hình người của Vingroup đi lại, chào cờ

Apple tìm cách bắt kịp Samsung, Google

TPHCM: Hiện thực hóa tầm nhìn trở thành trung tâm công nghệ hàng đầu khu vực

Thêm nhiều nước không còn được sử dụng khay SIM vật lý trên iPhone 17

Người dùng iPhone 16 sẽ có tính năng mới giá trị nhờ iOS 26

Microsoft tích hợp AI vào Excel: Giảm tải cho kế toán

Trí tuệ nhân tạo: xAI ra mắt mô hình lập trình thông minh mới

Ứng dụng công nghệ trong hoạt động kiểm toán đem lại độ chính xác cao

Microsoft ra mắt AI tạo 1 phút âm thanh trong 1 giây

Nhân viên Microsoft tử vong ngay tại công ty

'AI có thể nuốt chửng phần mềm' nhưng cổ phiếu nhiều hãng lại trải qua 1 tuần giao dịch bùng nổ

AI Google ngày càng hữu dụng ở Việt Nam
Có thể bạn quan tâm

Tang lễ diễn viên Ngọc Trinh: NS Thành Lộc - Việt Hương đến tiễn biệt, dàn sao gửi hoa chia buồn
Sao việt
13:34:10 02/09/2025
Điều gì khiến Taylor Swift công khai hết mình khi yêu Travis Kelce?
Sao âu mỹ
13:30:24 02/09/2025
Chạm đến vẻ đẹp mong manh qua từng lớp vải ren tinh xảo
Thời trang
13:23:46 02/09/2025
Steven Nguyễn "Mưa đỏ": Vai Quang khiến khán giả vừa ghét, vừa mê
Hậu trường phim
13:16:28 02/09/2025
Nam vũ công bị màn hình LED 600kg rơi trúng người đang gặp nguy hiểm tính mạng
Sao châu á
13:10:49 02/09/2025
Khoảnh khắc Mỹ Tâm đặt tay lên ngực áo, hát về Tổ quốc ở đại lễ 2/9 gây sốt
Nhạc việt
12:57:43 02/09/2025
Khi nấu canh củ sen, 99% mọi người sai lầm vì thao tác này: Sửa ngay để món canh ngọt ngon mà không bị thâm đen
Ẩm thực
12:53:47 02/09/2025
Hé lộ kích thước màn hình của iPhone 17 Pro Max
Đồ 2-tek
12:53:29 02/09/2025
Khối Quân nhân Trung Quốc hát vang "Như có Bác trong ngày đại thắng"
Tin nổi bật
12:26:49 02/09/2025
Tương lai Antony được định đoạt
Sao thể thao
12:16:59 02/09/2025
 Nguyên nhân diễn viên Ngọc Trinh (Mùi Ngò Gai) đột ngột qua đời
Nguyên nhân diễn viên Ngọc Trinh (Mùi Ngò Gai) đột ngột qua đời Xác minh clip DJ Ngân 98 phản ánh bị đuổi khỏi Nhà thờ Lớn Hà Nội
Xác minh clip DJ Ngân 98 phản ánh bị đuổi khỏi Nhà thờ Lớn Hà Nội Thành Lộc - Quyền Linh - Xuân Lan và dàn sao Việt bàng hoàng trước tin diễn viên Ngọc Trinh qua đời
Thành Lộc - Quyền Linh - Xuân Lan và dàn sao Việt bàng hoàng trước tin diễn viên Ngọc Trinh qua đời Mâu thuẫn gia đình, bà nội sát hại 2 cháu rồi tự tử
Mâu thuẫn gia đình, bà nội sát hại 2 cháu rồi tự tử Cuộc đời lận đận của NSƯT Ngọc Trinh: Hôn nhân với chồng Hàn tan vỡ, qua đời khi chưa có con
Cuộc đời lận đận của NSƯT Ngọc Trinh: Hôn nhân với chồng Hàn tan vỡ, qua đời khi chưa có con Bất ngờ trước hôn nhân của sao nữ đình đám: 6 giờ dậy nấu ăn, phải nuôi chồng nợ nần
Bất ngờ trước hôn nhân của sao nữ đình đám: 6 giờ dậy nấu ăn, phải nuôi chồng nợ nần Con gái nữ diễn viên Vbiz bị bại não: Nhiễm khuẩn từ trong bụng mẹ, 14 tuổi như bé sơ sinh
Con gái nữ diễn viên Vbiz bị bại não: Nhiễm khuẩn từ trong bụng mẹ, 14 tuổi như bé sơ sinh Được mời dự tiệc, chị gái nhận ra bạn nhậu của em là kẻ trộm xe Kawasaki 300
Được mời dự tiệc, chị gái nhận ra bạn nhậu của em là kẻ trộm xe Kawasaki 300 Diễn viên Ngọc Trinh "Mùi ngò gai" đột ngột qua đời tuổi 52
Diễn viên Ngọc Trinh "Mùi ngò gai" đột ngột qua đời tuổi 52