Khi top team DotA bị… “vùi hoa dập liễu”
 Sở hữu đội hình trong mơ với giá siêu rẻ
Sở hữu đội hình trong mơ với giá siêu rẻ 3 đặc sản của Fever Mix làm xiêu lòng các fan anime
3 đặc sản của Fever Mix làm xiêu lòng các fan animeNếu hỏi bất kỳ một game thủ nào về thông tin đáng chú ý nhất trong làng game Việt trong thời gian này thì câu trả lời đương nhiên sẽ là chế độ MOBA lần đầu tiên được xuất hiện trong Đột Kích vào ngày 28/11 tới đây.
Với các xạ thủ Đột Kích thì chưa rõ họ sẽ mất bao lâu để làm quen với chế độ chơi mới lạ này nhưng với những game thủ “gạo cội” của cộng đồng DotA thì việc chơi Đột Kích theo kiểu MOBA là một trải nghiệm hấp dẫn nhưng không hề dễ dàng.
Bên lề giải đấu “Thách đấu siêu sao” do VTC Game tổ chức vừa qua, Trương Quốc Hưng (nick Hưng Milano), thành viên Skynet – một trong những top team hàng đầu của cộng đồng DotA Hà Nội đã chia sẻ và phân tích nhiều điểm khá thú vị giữa hai dòng game FPS và MOBA.

Đột Kích MOBA đang là chủ đề hấp dẫn của nhiều diễn đàn game
PV: Chào Hưng Milano. Cảm nhận của bạn khi lần đầu tiên thử sức với chế độ MOBA?
Hưng Milano: Team đã có thời gian rất nhiều năm tập luyện và thi đấu DotA và DotA 2 nên có thể coi thể loại MOBA là “sân nhà” của bọn mình. Ngoài ra, thể loại FPS cũng như Đột Kích đều rất nổi tiếng và phổ biến tại Việt Nam, chính vì thế mà chúng tôi cũng đã có dịp thử sức qua tựa game này.

Skynet trong lần hiếm hoi đấu giải mà bị thất bại ngay từ vòng ngoài
Những điều này giúp cho Skynet không gặp quá nhiều khó khăn khi làm quen với CF moba, tuy nhiên để chiến thắng thì lại là vấn đề khác (cười).
Nhìn chung, đây là một chế độ khá thú vị và khác lạ trong dòng FPS, với những yếu tố rất quen thuộc của Dota như skill, level, creeps, towers … Điều này khiến game trở nên phức tạp hơn nhiều so với những game bắn súng đơn thuần, mà còn phải để tâm rất nhiều tới các yếu đi như push/ def trụ, chia lane và phối hợp giữa các class để đạt hiệu quả cao nhất trong trận đấu.
Theo mình, để thành thạo và phát triển được chế độ này, người chơi sẽ gặp khó khăn trong teamwork – một yếu tố không thể bỏ qua trong MOBA.
PV: Liệu có nhiều điêm giống nhau và khác nhau giữa DotA và Đột Kích MOBA?
Hưng Milano: Ồ, dĩ nhiên là rất nhiều điểm khác biệt rồi. Trước hết, nền tảng của 2 tựa game này là khác biệt hoàn toàn. Một bên là ARTS (action real time strategy) còn một bên là FPS (First Person Shooter), điều này khiến kỹ năng của game ở 2 tựa game là hoàn toàn khác nhau. Có thể nói, Dota 2 cần kỹ năng và tốc độ, còn FPS thì yêu cầu về phản xạ và độ chính xác.
Riêng điểm khác biệt này đã khiến 2 tựa game rất khó chung hòa được rồi. Tuy nhiên, thật bất ngờ khi chế độ Đột Kích MOBA phần nào lại có thể kết hợp được cả hai với nhau dù mình vẫn thấy hơi “quái” một chút (cười).
Như mình đã nói, những yếu tố như creeps, skills, level hay tower… là những điểm dễ thấy trong các game MOBA. Mặc dù ở 1 số tựa game FPS khác cũng đã có các yếu tố này, nhưng lần đầu ở Việt Nam xuất hiện chính thức nên cũng có nhiều điều thú vị.
Còn một chi tiết nữa, các kỹ năng đặc biệt khác của map như pháo, không kích hay năng lượng cũng là điểm riêng của CF MOBA mà chưa từng xuất hiện tại DotA.
PV: Theo bạn, những cao thủ MOBA sẽ mất bao lâu để làm quen với chế độ mới này
Hưng Milano: Làm quen thì có lẽ sẽ mất vài ngày, nhưng để vượt qua những cao thủ Đột Kích thì chắc là sẽ lâu đấy. Tại giải lần này, team mình đụng độ toàn top team CF nên không có nhiều cơ hội thắng.

Sẽ có thêm nhiều cao thủ DotA thử sức với Đột Kích MOBA?
PV: Tiềm năng phát triển của Đột Kích MOBA. Liệu nó có thể trở thành một môn thi đấu eSports?
Video đang HOT
Hưng Milano: Theo mình nghĩ đây là chế độ đòi hỏi độ gắn kết cao của các thành viên trong đội, không chỉ đòi hỏi sự phối hợp mà còn cần phải tuân thủ theo chiến thuật nhất định. Mà để phát triển được ở môi trường dành cho game thủ Việt thì đòi hòi nhà phát hành phải có sự đầu tư có chiều sâu cùng chiến lược dài hạn.
Còn về việc trở thành eSports, mình nghĩ đó là do nhà phát hành có tâm huyết muốn đưa nó lên hay không thôi. Còn ý kiến cá nhân đây là chế độ có thể thi đấu trong các giải được.
PV: Hỏi vui một chút, cảm xúc của bạn như thế nào khi bị những cao thủ Đột Kích “vùi dập”. Liệu Skynet có sẵn sàng tập luyện để “báo thù”?
Hưng Milano: Cũng không nằm ngoài dự kiến vì đây không phải là thế mạnh của team mình, kết quả cũng không bất ngờ lắm. Đến với giải này, team mang tâm lý giao lưu và trải nghiệm CF MOBA – cái tên đang khá hot gần đây chứ không đặt nặng thắng thua lắm.
Tuy nhiên thú thực là cảm giác bị các bạn CF “vùi hoa dập liễu” như vậy thì cũng hơi ức chế đấy (cười). Nhưng chắc là team mình sẽ hẹn gặp tái đấu với các team CF ở Hà Nội trong một dịp khác, có thể là Đột Kích, cũng có thể là DotA. Skynet luôn sẵn sàng chấp nhận những thử thách mới với tinh thần giao lưu, học hỏi.
PV: Những dự định, mục tiêu sắp tới của Skynet trong tương lai gần là gì?
Hưng Milano: Trong thời gian tới, team đang tập luyện để giữ vững vị trí của mình tại Dota 1 trong nước cũng như bắt đầu chinh phục Dota 2 đầy thử thách. Và nếu có thời gian, chúng tôi sẽ thử chơi Đột Kích MOBA nữa vì chế đô chơi này cũng khá thú vị.
Cảm ơn Hưng cùng cả team Skynet. Chúc toàn đội sẽ gặp nhiều may mắn trong thời gian tới!
Theo VNE
Nhìn lại thế giới robot suốt 3 thập kỉ qua
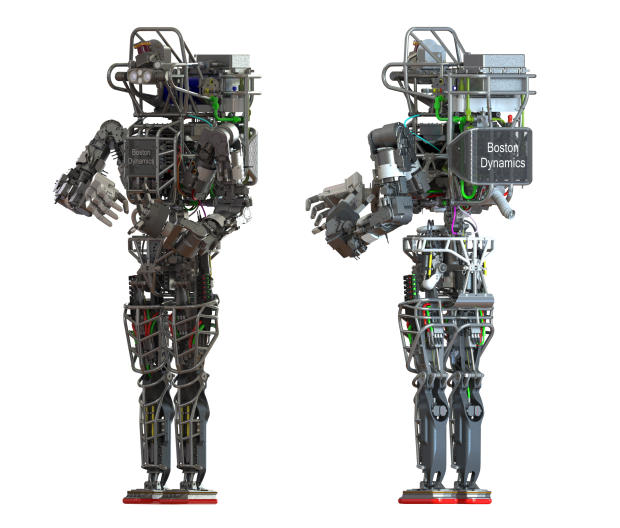
Cùng nhìn lại những bước tiến của ngành công nghiệp robot từ thưở sơ khai. Hôm thứ ba vừa rồi, thế giới lại thêm một lần nhớ tới cụm từ "Skynet" khi DARPA cho ra mắt thêm một mẫu robot Atlas với hình dạng người hết sức "hầm hố".
Với chiều cao 1,8m và 28 khớp thủy lực, đây tiếp tục là một bước tiến dài trong ngành công nghiệp chế tạo robot. Nhưng phần vẻ ngoài hầm hố này mới chỉ là bước khởi đầu. Cốt lõi của dự án nằm trong hệ thống trí tuệ nhân tạo và thần kinh điều khiển mà DARPA đang phát triển bằng cách tổ chức một cuộc thi phát triển cho 26 nhóm nghiên cứu từ khắp nơi trên thế giới. Sản phẩm của các nhóm này sẽ được DARPA sử dụng làm nền tảng để tiến xa hơn trong việc xây dựng cho mẫu robot này một "bộ não" đủ thông minh để hỗ trợ con người trong mọi lĩnh vực đời sống.
Tuy tạm thời chúng ta có thể yên tâm rằng con đường tạo ra một "Kẻ Hủy Diệt" hoàn thiện như trên phim ảnh vẫn còn rất xa vời. Nhưng sự thật là các công nghệ về cảm biến, cơ khí, mô phỏng cơ bắp, cơ chế điều khiển .v.v.v đang tiến bộ rất nhanh từng ngày, đem các mẫu robot mới càng lúc càng tiến gần hơn tới con người. Hãy cùng GenK nhìn lại 30 năm phát triển của ngày công nghiệp đầy tiềm năng này.
Cơ cao su nhân tạo 1967
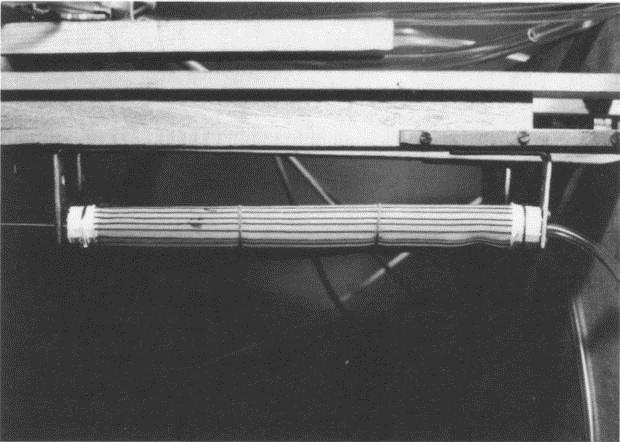
Năm 1967, các mẫu cơ nhân tạo đầu tiên đã được tiến sĩ Ichiro Kato và các cộng sự phát triển tại Đại Học Waseda - Nhật bản, đặt nền móng cho sự phát triển của ngành công nghiệp robot sau này. Sau một thời gian thử nghiệm, nhóm cuối cùng đã khiến các sợi cao su sắp xếp đang xen theo chiều dọc sinh ra được hiệu ứng tương tự như các bó cơ thật.
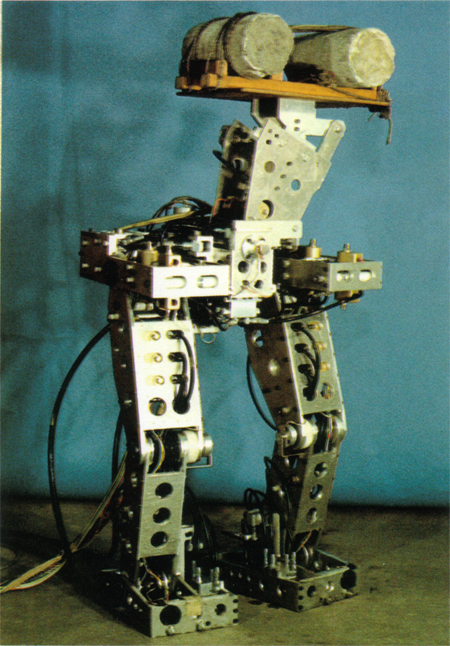
WL-3, 1968
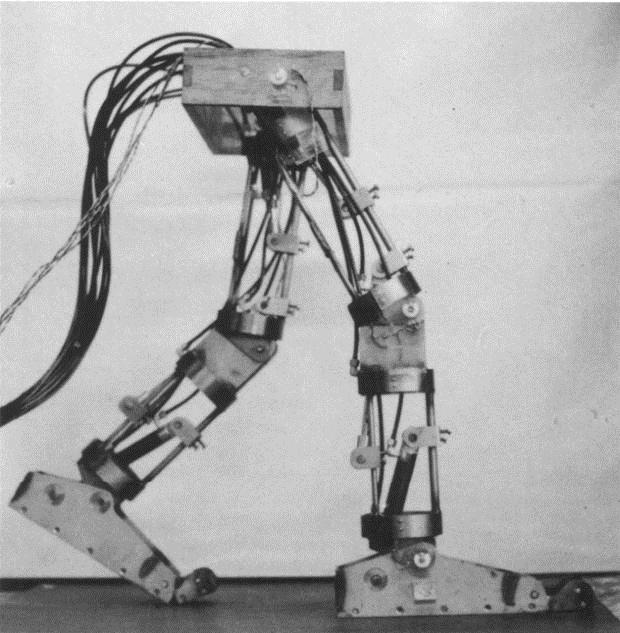
Sau quá trình nghiên cứu cơ chế hoạt động của phần thân dưới cơ thế, nhóm nghiên cứu của đại học Waseda tiếp tục chế tạo thành công cỗ máy với khả năng bước đi đầu tiên. Do giới hạn của công nghệ thời đó, bộ điều khiển và phần cơ khí được tách riêng, nhưng robot mang tên WL-3 cũng đã thành công trong việc tái hiện các chuyển động cơ bản của thân dưới như bước đi, ngồi xuống và đứng dậy.
Cải tiến cơ cao su nhân tạo, 1969
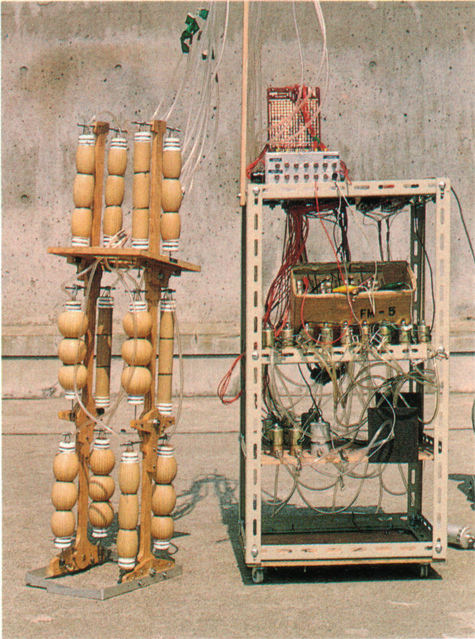
Hệ thống máy kích hoạt bằng khí nén mang tên WAP-1 ra đời năm 1969 tiếp tục kết hợp các thành tựu trước đó. Cũng sử dụng các sợi cơ nhân tạo bằng cao su, WAP-1 đồng thời mang khả năng chuyển động trên 2 trục (một cách hạn chế), tương ứng với chuyển động bước đi trên 2 chân.
WL-5, 1970
Không chấp nhận dừng lại với các thành công trước đó, các thành viên đại học Waseda tiếp tục phát triển robot WL-5 với khả năng bước khi linh hoạt hơn, đặc biệt tiến bộ hơn người tiền nhiệm ở khả năng chuyển hướng. Dĩ nhiên, với các hạn chế của công nghệ thời bấy giờ, bù lại WL-5 chỉ có khả năng bước đi ở tốc độ siêu rùa: mỗi bước tốn trung bình 45 giây.
Wabot-1, 1973
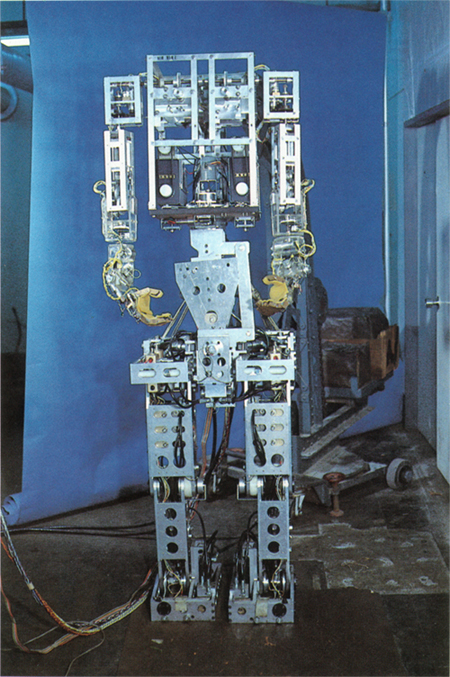
Wabot-1 là mẫu robot đầu tiên mô phỏng toàn bộ hình dáng con người được chế tạo. Bắt đầu được tích hợp các cảm biến, Wabot-1 bao gồm một hệ điều khiển các chi phục vụ chuyển động, một hệ phân tích hình ảnh và một số thiết bị liên lạc. Cảm biến hình ảnh cho phép Wabot-1 ước lượng khoảng cách và phương hướng tới vật thế. Mẫu robot này thậm chí có thể cầm nắm các vật thể bằng cách sử dụng các cảm biến xúc giác.
WL-10RD, 1984
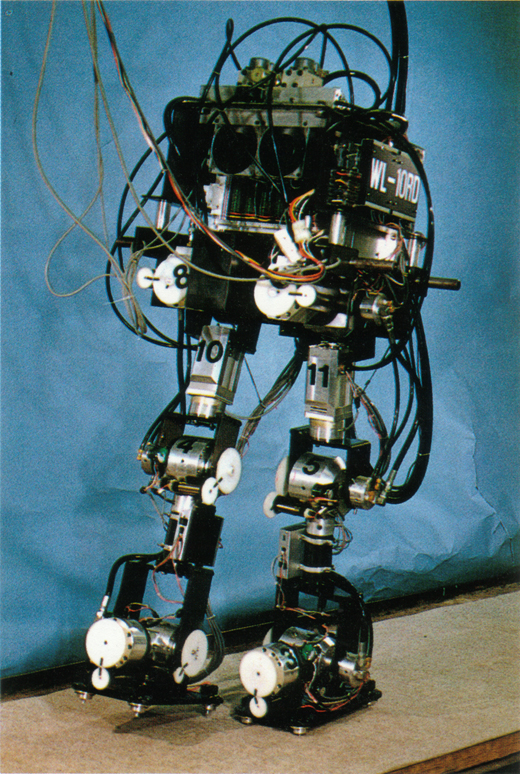
Tới mẫu robot WL-10RD, đại học Waseda đã thành công trong việc tích hợp cơ cấu mắt cá chân và khớp hông. Tận dụng phản hồi từ cảm biến tại các vị trí này, đây là mẫu robot đầu tiên có khả năng tự dịch chuyển trọng tâm giữa 2 chân để chuyển động một cách linh hoạt hơn. Kết quả là tốc độ bước đi "kỉ lục" cho các robot thời bấy giờ: 1.3 giây/ bước.
Shadow, 1987

Theo VNE
Năm 1987, Richard Greenhill sáng lập tập đoàn Shadow, chuyên về sản xuất robot và phát triển các công nghệ liên quan đến xây dựng robot. Hãng này đã góp nhiều công sức trong việc xây dựng các mẫu robot với khả năng hỗ trợ con người trong các hoạt động đơn giản thường ngày.
Manny, 1989

Trước các bước tiến của thế giới, quân đội Mĩ cũng quyết định không đứng ngoài cuộc chơi và đã xây dựng thành công robot Manny 1989. Đây là mẫu robot mô phỏng tốt nhất hình dáng con người tại thời điểm bấy giờ, nhưng đáng tiếc vẫn chưa có hệ thống trí tuệ nhân tạo hay cơ chế chuyển động tự động
P2, 1996
20/12/1996, tập đoàn Honda đã khuấy động Tokyo với sự xuất hiện của robot P2. Cao 1.8m và nặng hơn 200kg, Đây là một trong những mẫu robot đầu tiên được giải phóng khỏi hệ thống dây điều khiển và năng lượng phức tạp, nhờ hoạt động bằng pin.
H5, 1998
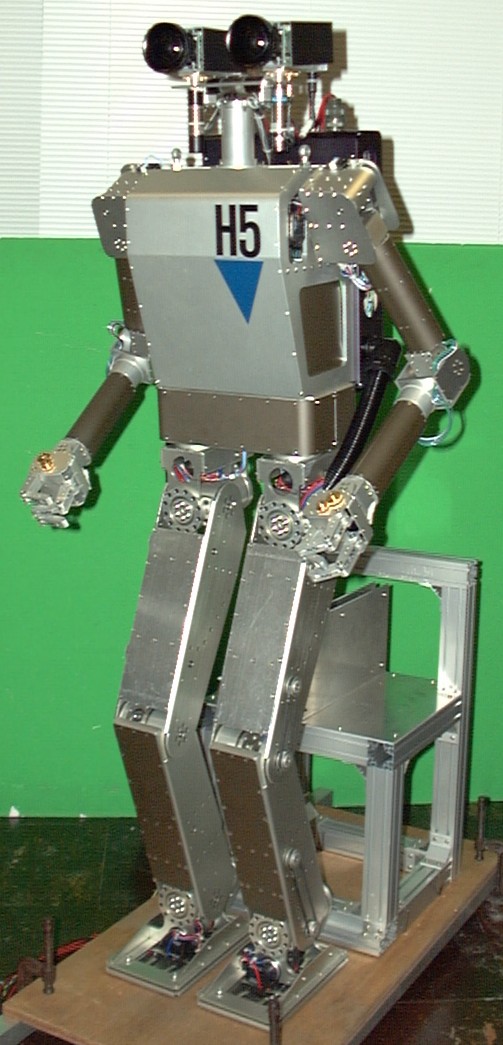
Năm 1998, tiếp tục đến lượt đại học Tokyo cho ra mắt sản phẩm thử nghiệm H5, với kích thước tương đường P2.
REEM-A, 2005

REEM-A, sản phẩm với khả năng đi lại, thao tác bằng tay, nói chuyện và phân tích hình ảnh được hoàn thiện vào năm 2005. Ngay sau đó vào 2006, REEM-A giành thắng lợi tại cuộc thi RoboCup tổ chức tại Bremen trong phần thi đi lại. Trong phần thi sút penalty, REEM-A cũng giành được vị trí thứ nhì.
Robothespian, 2005

RoboThespian, được bắt đầu phát triển năm 2005 tại Anh bởi tổ chức Engineered Arts Limited, là sản phẩm tiên phong cho các mẫu robot với khả năng tương tác thân thiện với con người. Với khả năng giao tiếp một cách hạn chế sử dụng nhiều loại ngôn ngữ khác nhau, mẫu robot này hiện vẫn liên tục được phát triển và được chào bán với giá khoảng 85000 USD để đặt tại các vị trí hướng dẫn trong khu mua sắm, sảnh đường.v.v.
HRP-3 Promet, 2007

Các mẫu robot HRP-3 Promet Mk-II, HRP-2 Promet, and HRP-3 Prototype lần đầu được giới thiệu tại khu thí nghiệm của tập đoàn Kawada trong một buổi họp bào năm 2007. Với chiều cao 1,6m và trọng lượng 68kg, đây là sản phẩm hợp tác của tập đoàn Kawada với Học viện khoa học và công nghệ cao của Nhật.
Dexter, 2007
Hãng Anybots của Mĩ vào 2007 cũng cho ra mắt 2 mẫu robot dạng người mang tên Dexter và Monty. Dexter cao 1,72m và nặng chỉ hơn 60kg mang trong mình khả năng đi lại, nhảy và tự động cân bằng chuyển động cơ thể gần giống với một con người. Để làm được điều này, Anybots sử dụng hệ thống các cảm biến trên thân Dexter, liên tục đo đạc và điều chỉnh các "cơ" - vốn là các xy-lanh khí - nhằm đạt mức cân bằng tốt nhất.
Aero-Blue, 2008

Tiếp tục tại cuộc thi "nội trợ" của robot tổ chức tại quận Kanagawa - Tokyo năm 2008, hình ảnh của Aero-Blue đang gập chiếc áo phông từ giỏ quần áo giặt là minh chứng rõ ràng nhất rằng các thế hệ robot mới đang tiến ngày càng gần hơn tới khả năng thực hiện các tác vụ thường ngày thay cho con người.
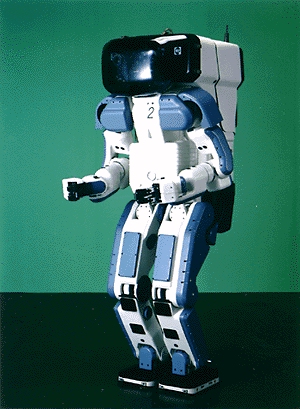
Asimo
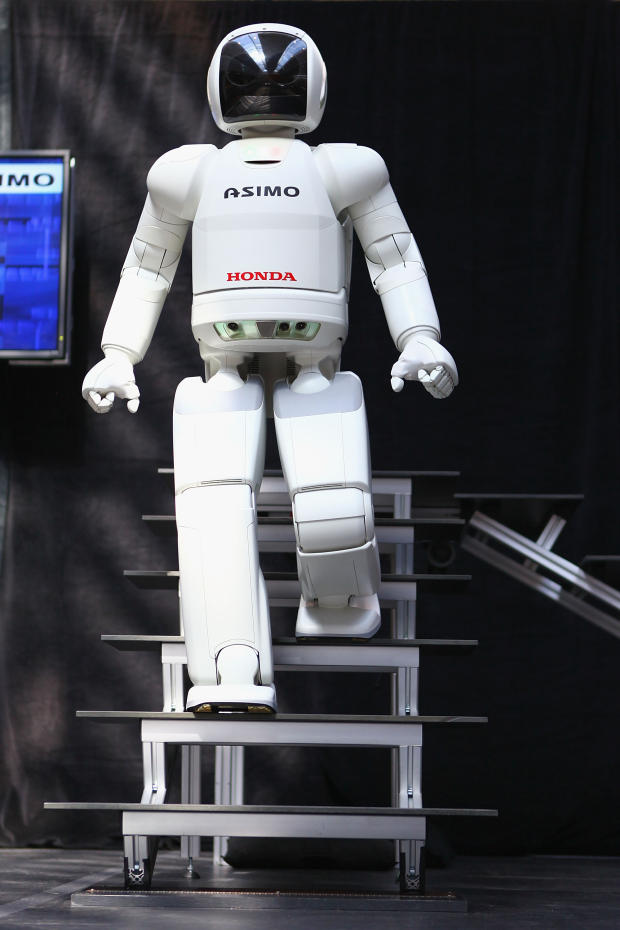
Năm 2011 , Honda tiếp tục thu hút được sự chú ý của toàn thế giới khi giới thiệu chú robot mà sau này danh tiếng được rất nhiều người biết tới - Asimo - ngay trên đất Mĩ.
Trí tuệ vật lí

Với các tiến bộ vượt bậc trong công nghệ điều khiến và cảm biến, các mẫu robot hiện đại ngày nay phần lớn đều đã có khả năng di chuyển qua nhiều loại địa hình và sử dụng một số công cụ cơ bản vốn được thiết kế cho con người
Vậy tiếp theo là gì? Dĩ nhiên là hệ thống trí tuệ tân tiến, và đó chính xác là điều DARPA đang nhắm đến. Hồi đầu năm nay, trên tạp chí Quốc Phòng của Mĩ, tiến sĩ James K. Gimzewski của đại học California cho biết bằng với các nỗ lực tái tạo cấu trúc tổ chức của bộ não hiện nay, chúng ta sẽ sớm được chứng kiến một bước đột phá trong ngành công nghiệp robot nói chung và hệ thần kinh nhân tạo nói riêng. Được biết thêm, Gimzeski hiện là cộng sự của DARPA trong một sự án mang tên Trí Tuệ Vật Lý (Physical Intelligence). Ông cho biết "Về cơ bản, cơ chế xử lí dữ liệu mà chúng tôi đang phát triển này sẽ hoàn toàn khác với cơ chế chuyển dữ liệu từ bộ nhớ vào vi xử lí trên các máy tính hiện nay".
Tổng kết giải Dream DotA Tournament I: Chức vô địch thuộc về BFF  Đây là một sự kiện quy tụ các đội DotA mạnh nhất cả nước tranh tài với thể thức loại trực tiếp đầy khốc liệt. Và cái tên đã dành chiến thắng cuối cùng không ai khác chính là BFF. Ngay từ lúc 7 giờ 40 phút, rất nhiều game thủ tài năng đã tập trung tại Custom map room 10. Tuy vậy,...
Đây là một sự kiện quy tụ các đội DotA mạnh nhất cả nước tranh tài với thể thức loại trực tiếp đầy khốc liệt. Và cái tên đã dành chiến thắng cuối cùng không ai khác chính là BFF. Ngay từ lúc 7 giờ 40 phút, rất nhiều game thủ tài năng đã tập trung tại Custom map room 10. Tuy vậy,...
 Google đang tạo dựng bộ não ảo: Đã tới thời của Skynet?
Google đang tạo dựng bộ não ảo: Đã tới thời của Skynet? Độc lạ 'vua hài' Xuân Hinh rap, Hòa Minzy 'gây bão' triệu view04:19
Độc lạ 'vua hài' Xuân Hinh rap, Hòa Minzy 'gây bão' triệu view04:19 Vụ ngoại tình hot nhất MXH hôm nay: Bỏ 400 triệu đồng giúp chồng làm ăn, vợ mở camera phát hiện sự thật đau lòng00:57
Vụ ngoại tình hot nhất MXH hôm nay: Bỏ 400 triệu đồng giúp chồng làm ăn, vợ mở camera phát hiện sự thật đau lòng00:57 Toàn cảnh vụ fan 'Anh trai say hi' mắng nghệ sĩ tới tấp ở rạp chiếu phim02:46
Toàn cảnh vụ fan 'Anh trai say hi' mắng nghệ sĩ tới tấp ở rạp chiếu phim02:46 Người đàn ông không rời mắt khỏi Mỹ Tâm01:04
Người đàn ông không rời mắt khỏi Mỹ Tâm01:04 Nam Em khiến khán giả tức giận00:20
Nam Em khiến khán giả tức giận00:20 Về Ninh Thuận gặp ông bà ngoại bé Bắp giữa ồn ào 16,7 tỷ đồng từ thiện: "Con tôi nhỡ miệng, mong cô chú tha thứ cho nó"04:58
Về Ninh Thuận gặp ông bà ngoại bé Bắp giữa ồn ào 16,7 tỷ đồng từ thiện: "Con tôi nhỡ miệng, mong cô chú tha thứ cho nó"04:58Tiêu điểm
 Thống kê doanh thu game Gacha tháng 2/2025: Nhiều bom tấn thua lỗ trầm trọng, chỉ có 1 cái tên tăng trưởng gấp đôi?
Thống kê doanh thu game Gacha tháng 2/2025: Nhiều bom tấn thua lỗ trầm trọng, chỉ có 1 cái tên tăng trưởng gấp đôi? Ra mắt demo miễn phí quá hot, game bom tấn bất ngờ nhận cái kết đắng, bị chỉ trích nhiều vì hút máu
Ra mắt demo miễn phí quá hot, game bom tấn bất ngờ nhận cái kết đắng, bị chỉ trích nhiều vì hút máu Cựu sao VCS tuyên bố giải đấu "có vấn đề" khiến cộng đồng tranh cãi
Cựu sao VCS tuyên bố giải đấu "có vấn đề" khiến cộng đồng tranh cãi Alpha Test thành công rực rỡ, liệu bao giờ Chinh Đồ 2 Origin chính thức phát hành?
Alpha Test thành công rực rỡ, liệu bao giờ Chinh Đồ 2 Origin chính thức phát hành? Nhân viên cửa hàng game bất ngờ hóa "anh hùng", chặn đứng vụ cướp gần 1 tỷ đồng
Nhân viên cửa hàng game bất ngờ hóa "anh hùng", chặn đứng vụ cướp gần 1 tỷ đồng Ra mắt trailer đấu boss, bom tấn hứa hẹn vượt mặt Black Myth: Wukong khiến game thủ mê mệt
Ra mắt trailer đấu boss, bom tấn hứa hẹn vượt mặt Black Myth: Wukong khiến game thủ mê mệt Bom tấn Battle Royale công bố thử nghiệm điên rồ, chuyển hướng thành game cho 150 người?
Bom tấn Battle Royale công bố thử nghiệm điên rồ, chuyển hướng thành game cho 150 người? Duy trì hơn 300.000 người chơi trên Steam, game bom tấn hé lộ bí mật không ngờ, suýt nữa bị "xóa sổ"
Duy trì hơn 300.000 người chơi trên Steam, game bom tấn hé lộ bí mật không ngờ, suýt nữa bị "xóa sổ"Tin đang nóng
 Cục trưởng Xuân Bắc nói gì về Hòa Minzy mà gây bão mạng?
Cục trưởng Xuân Bắc nói gì về Hòa Minzy mà gây bão mạng? Ảnh chụp từ camera trong biệt thự vào nửa đêm hé lộ cuộc sống không như tưởng tượng của nàng dâu hào môn
Ảnh chụp từ camera trong biệt thự vào nửa đêm hé lộ cuộc sống không như tưởng tượng của nàng dâu hào môn Con gái 13 tuổi của Ảnh hậu Lý Tiểu Lộ kêu cứu
Con gái 13 tuổi của Ảnh hậu Lý Tiểu Lộ kêu cứu Nam Em thành trò hề
Nam Em thành trò hề Mẹ bầu Vbiz gây xúc động với câu chuyện âm thầm giúp 1 bà mẹ đơn thân
Mẹ bầu Vbiz gây xúc động với câu chuyện âm thầm giúp 1 bà mẹ đơn thân Mạc Anh Thư gặp sự cố hậu ly hôn Huy Khánh
Mạc Anh Thư gặp sự cố hậu ly hôn Huy Khánh Ngày sinh âm lịch của người có nhiều phúc phần, nhiều may mắn nên cả đời nhàn tênh
Ngày sinh âm lịch của người có nhiều phúc phần, nhiều may mắn nên cả đời nhàn tênh Thấy người đàn ông chạm vào vai vợ khi hát song ca, chồng rủ bạn gây án
Thấy người đàn ông chạm vào vai vợ khi hát song ca, chồng rủ bạn gây ánTin mới nhất

ĐTCL mùa 13: 3 đội hình sắp "hóa rồng" ở meta mới nhờ Riot "hồi sinh" mạnh mẽ

Bom tấn thế giới mở bất ngờ khuyến mãi cao nhất lịch sử, game thủ hào hứng để sở hữu

Xuất hiện tựa game "cuốn" hơn Among Us, mới ra mắt đã có rating 97% tích cực trên Steam

Xuất hiện tựa game sinh tồn lấy cảm hứng từ series Dune nổi tiếng, đã có ngày ra mắt chính thức

"Cha đẻ" Mobile Legends: Bang Bang ra mắt game RPG mới, đồ họa quá đẹp khiến game thủ "đứng ngồi không yên"

Sứ Giả Khe Nứt bất ngờ hóa "hung thần" tại bản mới LMHT khiến game thủ "khóc thét"

Một nhân vật của Genshin Impact quá bá đạo, miHoYo thẳng tay "trừng trị" theo cách không ai ngờ

Genshin Impact gây thất vọng khi ra mắt Banner "siêu chán", mở ra "cơ hội vàng" để anh em game thủ tích tiền cho đại phiên bản 6.0

Bán gói vật phẩm game giá gần 10 tỷ, NPH tiết lộ sự thật không ngờ

Half-Life 3 chuẩn bị ra mắt, game thủ tìm thấy chứng cứ cực kỳ thuyết phục

Ra mắt sự kiện kết hợp với Ninja Rùa, bom tấn thu phí tới gần 2,3 triệu, game thủ bất mãn vì nạn "hút máu"

ĐTCL mùa 13: Leo hạng thần tốc cùng đội hình Cực Tốc - Vệ Binh sát thương cực "lỗi"
Có thể bạn quan tâm

EU điều chỉnh mục tiêu phát thải ô tô, giảm áp lực cho ngành công nghiệp
Thế giới
20:09:45 04/03/2025
Clip cậu bé không có cơm trưa được cô giáo nấu mỳ cho khiến dân mạng nghẹn ngào
Netizen
20:08:59 04/03/2025
Nhâm Mạnh Dũng yêu với nàng hot TikToker từng vướng ồn ào vì ăn mặc phản cảm, giờ đã rõ thái độ của mẹ chàng cầu thủ
Sao thể thao
20:04:48 04/03/2025
Bị xử phạt vì dàn dựng hình ảnh, đăng tin sai sự thật về Công an
Pháp luật
20:01:45 04/03/2025
Nữ người mẫu vừa bị bắt giữ vì phạm tội ma túy bắt đầu mất kiểm soát trong tù
Sao châu á
19:57:05 04/03/2025
'Cha tôi người ở lại' tập 8: Vì sao bà Liên và chồng trở mặt?
Phim việt
19:47:22 04/03/2025
Hôn nhân của Ngô Thanh Vân và chồng kém 11 tuổi
Sao việt
19:35:48 04/03/2025
Sau khi chứng kiến vô số ngôi nhà sạch sẽ, tôi phát hiện họ có 7 "bí mật"
Sáng tạo
19:22:30 04/03/2025
5 món tuyệt đối không nên ăn vào buổi tối
Sức khỏe
19:12:52 04/03/2025
Tử vi ngày 5/3/2025 của12 cung hoàng đạ: Công việc suôn sẻ, tình duyên khởi sắc
Trắc nghiệm
18:07:13 04/03/2025

 Kết quả vụ tranh gia sản Từ Hy Viên: 761 tỷ tiền thừa kế chia đôi, chồng Hàn có cú "lật kèo" gây sốc
Kết quả vụ tranh gia sản Từ Hy Viên: 761 tỷ tiền thừa kế chia đôi, chồng Hàn có cú "lật kèo" gây sốc Sao Việt "huyền thoại" đóng MV của Hòa Minzy, cõi mạng dậy sóng vì các phân cảnh đắt giá từng chút một
Sao Việt "huyền thoại" đóng MV của Hòa Minzy, cõi mạng dậy sóng vì các phân cảnh đắt giá từng chút một Thái độ Xuân Hinh dành cho Hòa Minzy
Thái độ Xuân Hinh dành cho Hòa Minzy Cuộc hôn nhân ngắn nhất showbiz: Sao nữ bị chồng đánh sảy thai rồi vứt trên đường, ly dị sau 12 ngày cưới
Cuộc hôn nhân ngắn nhất showbiz: Sao nữ bị chồng đánh sảy thai rồi vứt trên đường, ly dị sau 12 ngày cưới Bắc Bling vừa ra mắt đã nhận gạch đá, Hòa Minzy nói gì?
Bắc Bling vừa ra mắt đã nhận gạch đá, Hòa Minzy nói gì?
 Thấy có nhiều chim lợn, trường mua vàng mã, mời thầy về cúng!
Thấy có nhiều chim lợn, trường mua vàng mã, mời thầy về cúng!